导读:传统的直接转矩控制方法6扇区电压矢量选择会导致磁链控制不对称、转矩脉动大等问题,本期介绍一种把扇区细分为12扇区的新型三相异步
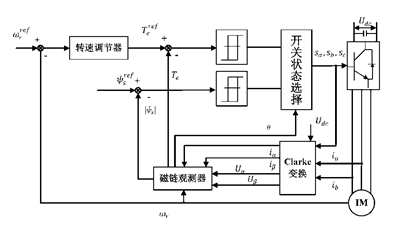
在电动机实际运行中,保持定子磁链幅值为额定值,以便充分的利用电动机铁芯;转子磁链幅值由负载决定。通过控制定子磁链与转子磁链之间的夹角即转矩角能控制电动机的转矩。在直接转矩控制中,其基本操控方法是通过选择电压空间矢量来控制定子磁链的旋转速度,控制定子磁链走走停停,以改变定子磁链的平均旋转速度的大小,从而改变转矩角的大小,以达到控制电动机转矩的目的。
传统的直接转矩操控方法6扇区电压矢量选择会导致磁链控制不对称、转矩脉动大等问题,该文提出了一种把扇区细分为12扇区的新型三相异步电机直接转矩操控方法,矢量选择表见表1。
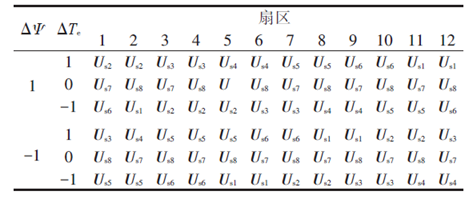
扇区细分的做法是每 30 ° 一个扇区,总共 12扇区。第1扇区磁链角为-15 °~15 °,第2扇区为15 °~45 ° ,接下来每扇区依次增加 30° 。这样的划分法有效地避免了某些电压矢量处于扇区分界线处而导致的控制失效。但是,为了减小启动过程电流过大和改善磁链轨迹,在启动阶段对磁链和电流进行限制。当电机刚开始启动时,为了减小启动电流,对电流进行限制,并且使得初始给定转速为零,并利用电压矢量 Us1和Us7持续不断的增加磁链幅值直到预期幅值。之后,正常按直接转矩控制运行。一旦电流达到电流幅值上限,就选择 Us7,在规定幅值以下,采用矢量表选出电压矢量。
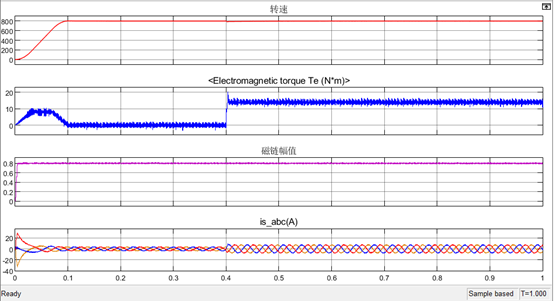
从图(3-2)和(3-3)可知,基于12扇区的DTC的定子磁链和转矩的脉动相对减小。

是与减速机(牙箱)通过联轴器相连接,编码器的电压一般是5--30VDC,编码器可输出
(Direct Torque Control, DTC)进行建模分析,以最简单的单矢量
铭牌参数 UN=380 V、IN=30 A、PN=15 kW、nN=1460 r/min、功率因数cos∅=0.86、过载能力
(机座号140T-449T,功率1-250HP),是上海百特机电有限公司根据北美市场
(Triple-phase asynchronous motor)是感应电动机的一种,是靠同时接入380V
的转子与定子旋转磁场以相同的方向、不同的转速成旋转,存在转差率,所以叫
的启动进行概述,分析了软启动的原理和特性,介绍了软启动系统构成及作用,同时分析了软启动技术的优越性和实用性。
启动仿真小树不修不直溜,人不学习哏揪揪!隔了好长一段时间,本小学生终于又回归正常的学习与记录生活。前些时,利用CADe_SIMu V1.0仿线
马达的研发生产厂商,基本的产品有保修2年可延保6年,保用10年的耐用中型减速
是几极的?比如是2极、4极、6极、8极……然后能够最终靠它的极数判断它的额定转速。那么
正反转电路是电工基础中最有代表性的电气原理图,其中包含很多我们常用的电气元件、
电动机转子的转速低于旋转磁场的转速,转子绕组因与磁场间存在着相对运动而感生电动势和电流,并与磁场相互作用产生电磁
电动机又称感应电动机,是由气隙旋转磁场与转子绕组感应电流相互作用产生电磁
电动机转子的转速低于旋转磁场的转速,转子绕组因与磁场间存在着相对运动而产生电动势和电流,并与磁场相互作用产生电磁
原理,本文提出了一种基于数字信号处理器(DSP)TMS320F2812
系统的硬件设计的具体方案,包括正弦脉冲宽度调制波形(SPWM)的产生和绝缘栅双
要求第1台电动机M1启动5 s后,第2台电动机M2自动启动,只有当第2台M2停止后,经过5 s延时,M1自动停止。图3所示是
电动机的工作原理,电磁关系以及短路堵转时的特点,建立电动机短路堵转时的电磁变化规律和数学模型,从而对


